Organized by Method
Foundamentals of Disturbance Rejection Control
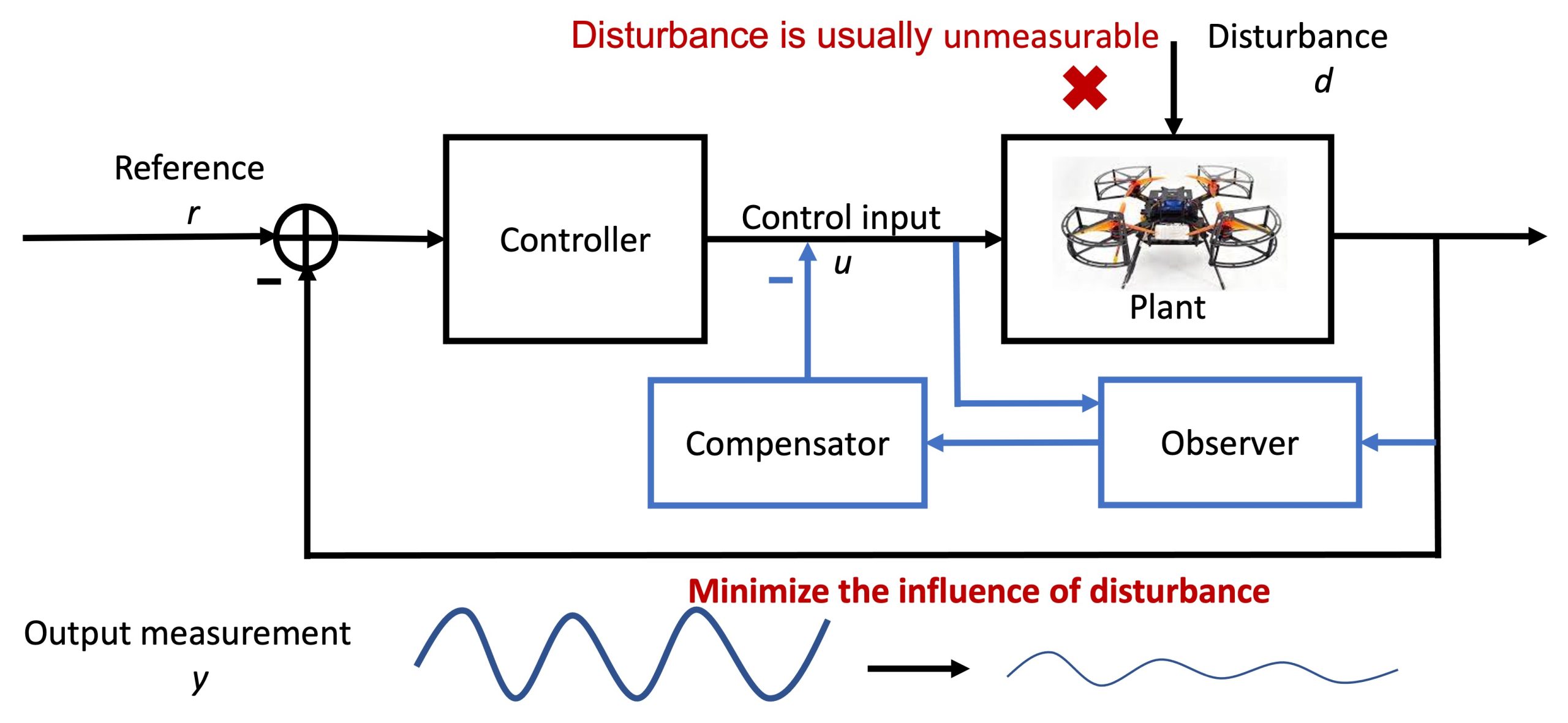
Disturbance rejection control focuses on estimating disturbances-typically unmeasurable-and minimizing their influence on the control output. This challenge lies at the core of modern control theory and design methodologies. Our research addresses several key questions: (1) What kind of disturbances can be estimated without bias? (2) What is the transient performance of disturbance estimation, e.g., is there any tight error bound? (3) How to design disturbance rejection controllers for both matched and mismatched disturbances? (4) How can practical observers and controllers be realized in complex linear/non-linear multiple-input and multiple-output (MIMO) systems?
Disturbance-Aware Safe Control
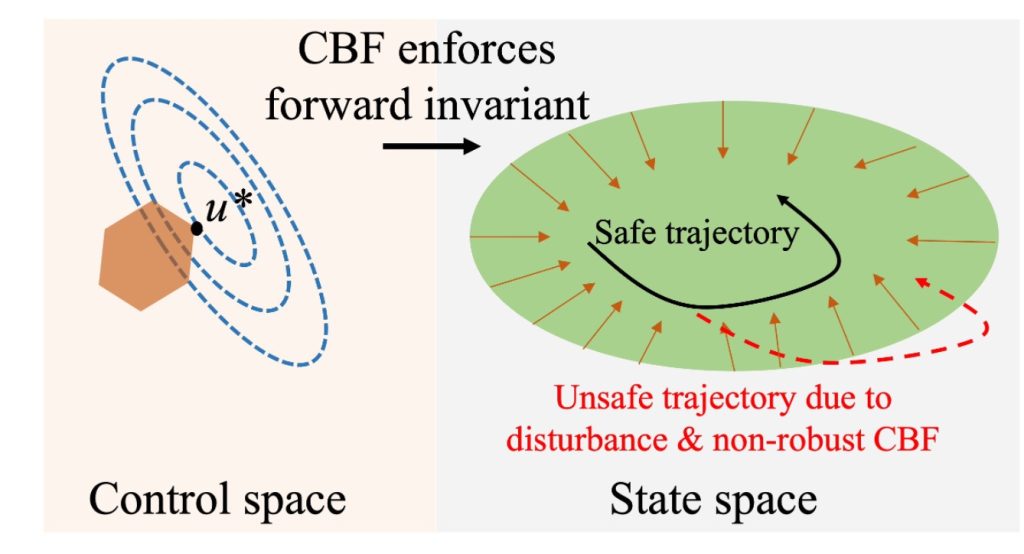
Robots are deployed in many safety-critical scenarios, such as human-robot interactions and on extremely expensive robot platforms themselves. Fundamental synthesis tools rooted in control theory are critical for designing provably safe controllers for conventional and (semi-)autonomous robotic systems. We focus on safety-guaranteed control solutions under various uncertainties.

Disturbance Rejection-Guarded Learning
We develop a new learning-based control paradigm by combining machine learning and ESO. On one hand, the machine learning model attempts to model the disturbance. With the assistance of prior information about the disturbance, the observer is expected to achieve faster convergence in disturbance estimation. On the other hand, machine learning benefits from an additional assurance layer provided by the ESO, as any imperfections in the machine learning model can be compensated for by the ESO.
Organized by Method
Autonomous Driving & Racing
- Uncertainty-aware motion planning and control
Robotic Manipulation
- Robust and safe manipulation control
Drone
- Fault-tolerant flight control under actuator failure
Legged Robot
- Sensorless contact detection